Şimdilik, bağlantı çok çeşitli birleşimler/düğümler için çalışmaktadır. Ancak lütfen desteklenmeyen işlevleri göz önünde bulundurun.
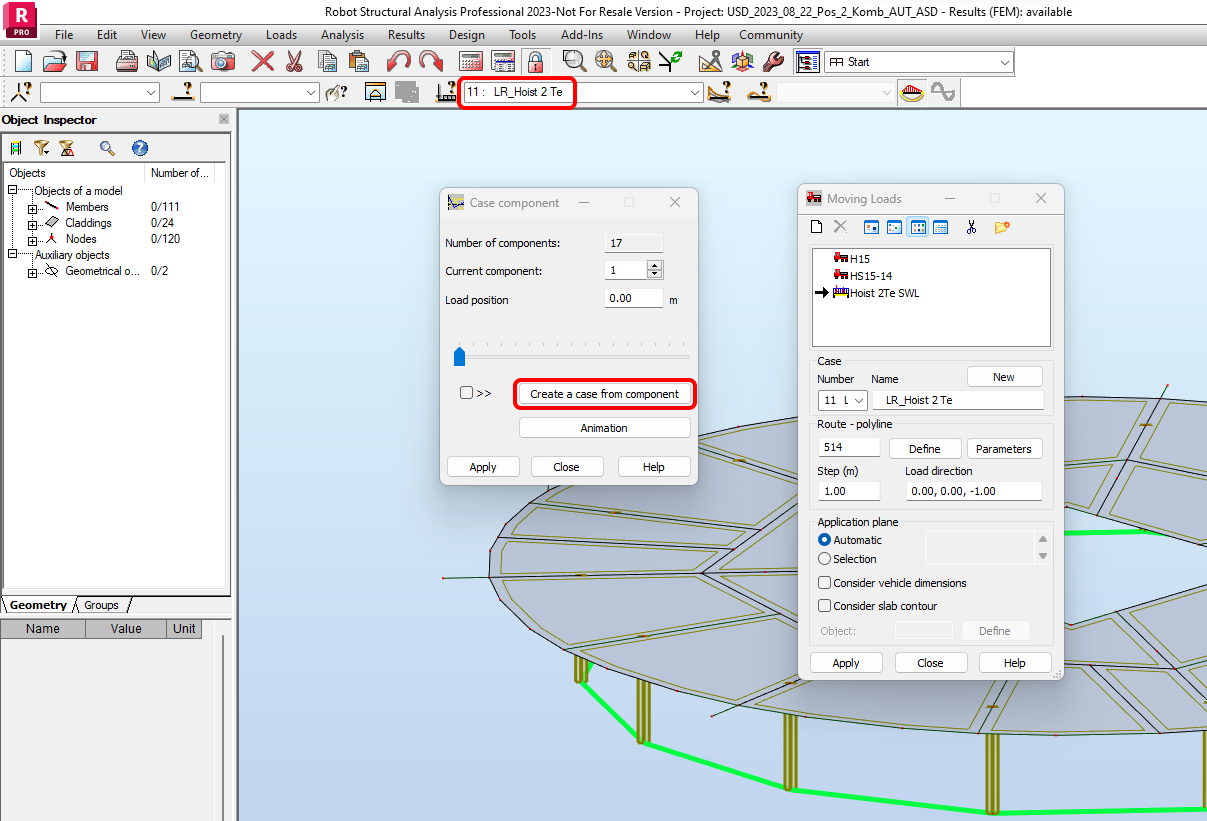
Sınırlama: Hareketli (kademeli) Yük Durumu Checkbot'a aktarılmaz. Hareketli (kademeli) Yük Durumu içeren yük kombinasyonları aktarılır; ancak Hareketli (kademeli) Yük Durumları ve bunların iç kuvvetleri dahil edilmez.
Geçici çözüm: Robot Structural Analysis'te "Create a case from component" komutunu kullanarak Hareketli (kademeli) Yük Durumunu tekil yük durumlarına ayırın. Ardından birleşimi veya elemanı aktarın; bu yük durumları hem ayrı ayrı hem de tanımlı yük kombinasyonlarına dahil edilerek aktarılacaktır.
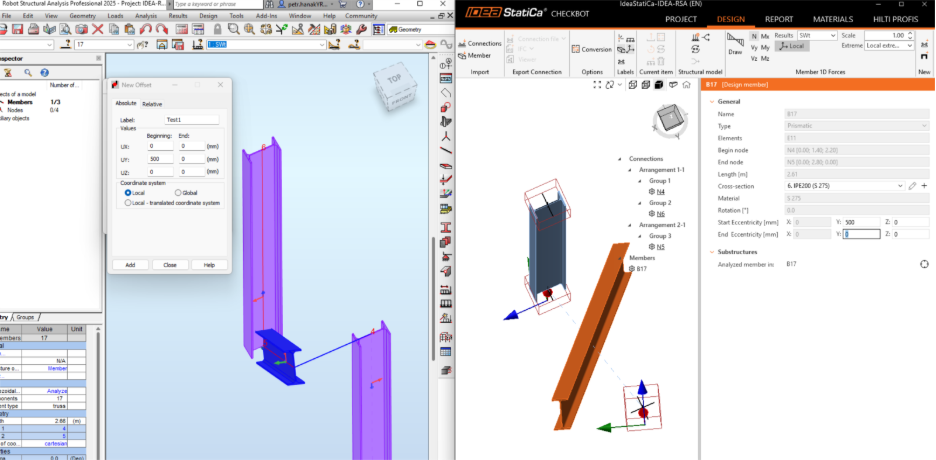
Sınırlama: Robot'ta başlangıç ve bitiş noktalarında farklı ofsetler kullanılması, bu ofsetlerden etkilenen geometrinin Robot ile Checkbot'ta farklı olmasına neden olur. Bunun nedeni, her iki yazılımın dışmerkezlikleri uygulama yaklaşımının farklı olmasıdır.
Geçici çözüm: İstenen geometriyi elde etmek için Checkbot'taki Başlangıç ve Bitiş Dışmerkezliği öğelerini kullanarak geometriyi ayarlayın.
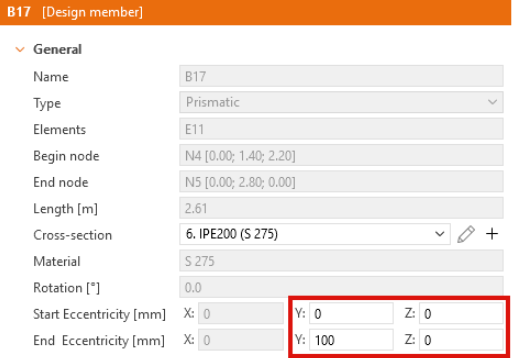
Sınırlama: Robot'ta yalnızca bir uçta tanımlanan dışmerkezlik – bu tür aktarım Checkbot'ta desteklenmez ve elde edilen geometri hatalıdır. Sorun, Robot'ta elemanın yerel koordinat sisteminin (LCS) tanımlanan dışmerkezliği zaten içermesinden kaynaklanmaktadır. Checkbot'a aktarım sırasında eleman, Robot'un LCS'inden alınan başlangıç noktası ve yönüne göre oluşturulur. Bu durum, elemanın baştan yanlış konumlandırılmasına neden olur. Ayrıca Robot'ta tanımlanan dışmerkezlik Checkbot'ta tekrar uygulanır; bu da tutarsızlığı artırır ve hedeflenen ile aktarılan geometri arasındaki farkı daha da büyütür.
Geçici çözüm: Robot'ta tek taraflı dışmerkezlik kullanmayın; bunun yerine aktarımdan sonra Checkbot'ta manuel olarak ayarlayın. Ancak bu durumda senkronizasyon seçeneği kullanılamaz.