Deocamdată, legătura funcționează pentru o gamă largă de îmbinări/rosturi. Cu toate acestea, vă rugăm să luați în considerare funcționalitățile neacceptate.
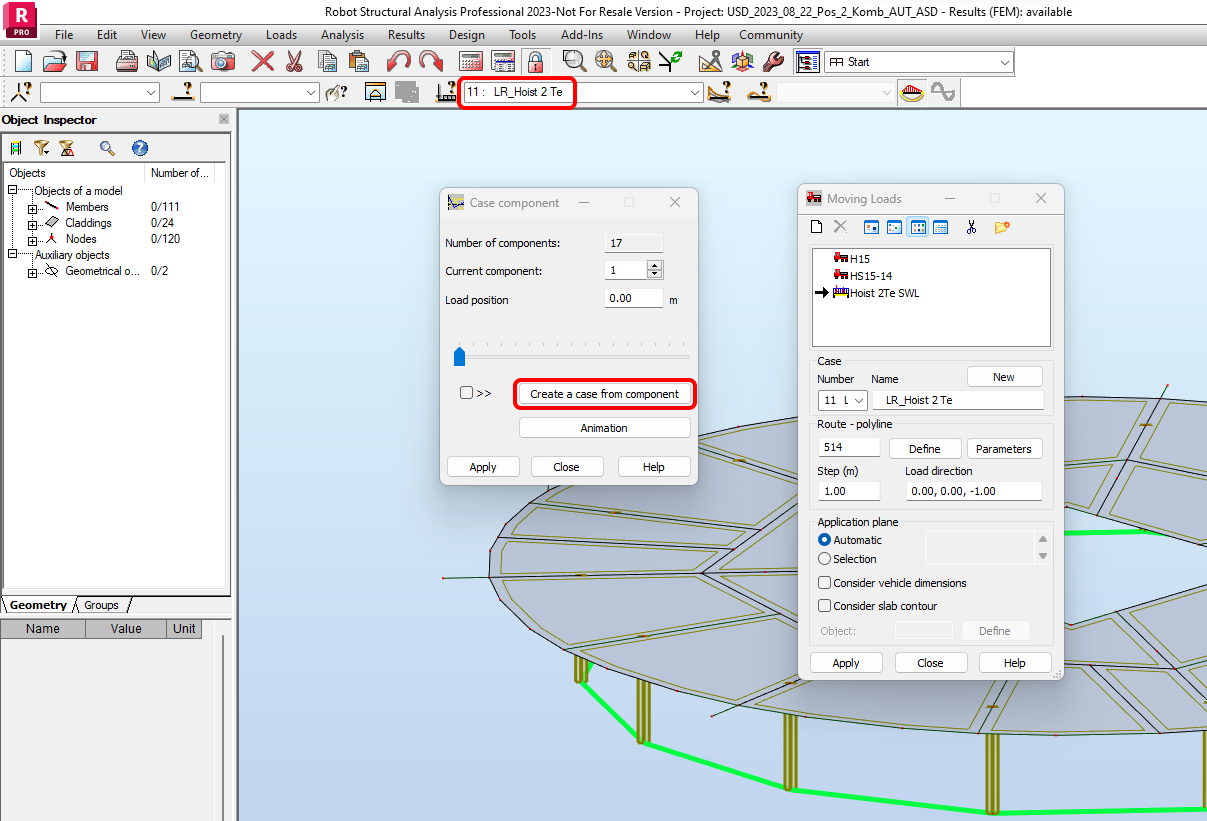
Limitare: Cazul de încărcare mobil (în trepte) nu este importat în Checkbot. Combinațiile de încărcări care conțin un caz de încărcare mobil (în trepte) sunt importate, dar cazurile de încărcare mobile (în trepte) și forțele lor interioare nu sunt incluse.
Soluție alternativă: Descompuneți cazul de încărcare mobil (în trepte) în cazuri de încărcare individuale în Robot Structural Analysis folosind comanda „Create a case from component". Apoi, importați îmbinarea sau elementul, iar aceste cazuri de încărcare vor fi importate separat și incluse în combinațiile de încărcări definite.
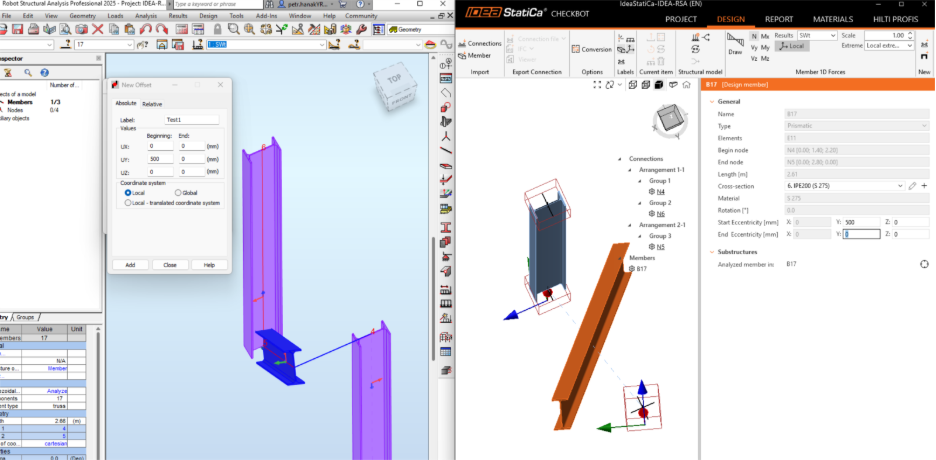
Limitare: Utilizarea unor excentricități diferite la capătul de început și la capătul de sfârșit în Robot va determina o geometrie finală diferită a elementelor afectate de aceste excentricități în Robot față de Checkbot. Motivul este abordarea diferită de aplicare a acestor excentricități în fiecare dintre aceste programe.
Soluție alternativă: Ajustați geometria folosind elementele Excentricitate la început și Excentricitate la sfârșit din Checkbot pentru a obține geometria dorită.
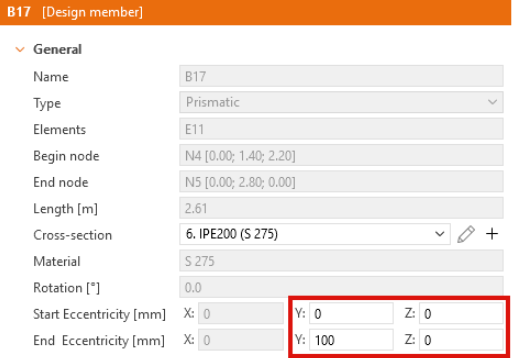
Limitare: Excentricitatea definită doar la un capăt în Robot – acest tip de import nu este acceptat în Checkbot, iar geometria rezultată este incorectă. Problema apare deoarece, în Robot, sistemul de coordonate local (SCL) al elementului include deja excentricitatea definită. La importul în Checkbot, elementul este generat pe baza punctului de start și a direcției preluate din SCL-ul Robot. Aceasta determină poziționarea incorectă a elementului de la bun început. În plus, excentricitatea definită în Robot este aplicată din nou în Checkbot, ceea ce mărește discrepanța și conduce la o diferență și mai mare între geometria intenționată și cea importată.
Soluție alternativă: Nu utilizați excentricitate unilaterală în Robot; în schimb, ajustați-o manual în Checkbot după import. Cu toate acestea, aceasta înseamnă că opțiunea de sincronizare nu poate fi utilizată.