Per ora, il collegamento funziona per un'ampia varietà di collegamenti/giunti. Tuttavia, si prega di tenere conto delle funzionalità non supportate.
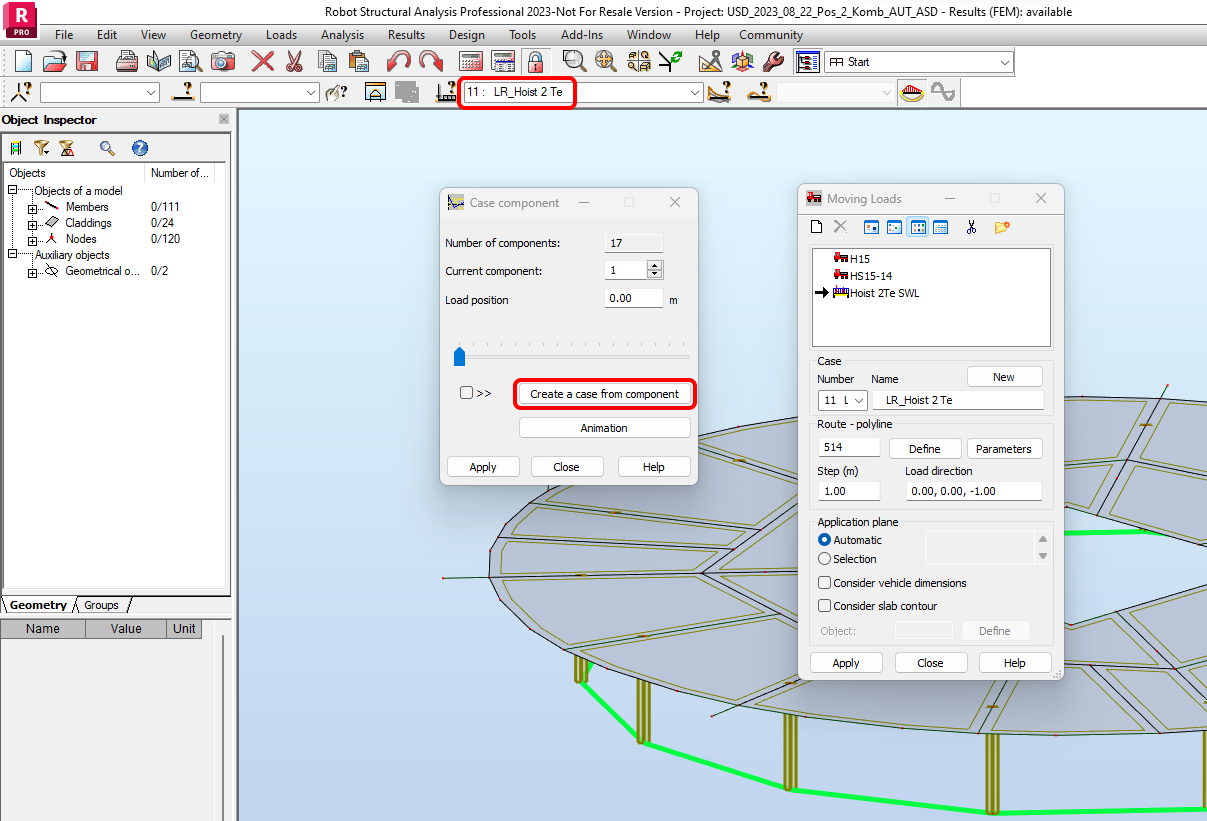
Limitazione: Il caso di carico Mobile (a gradini) non viene importato in Checkbot. Le combinazioni di carico contenenti un caso di carico Mobile (a gradini) vengono importate, ma i casi di carico Mobile (a gradini) e le relative forze interne non sono inclusi.
Soluzione alternativa: Scomporre il caso di carico Mobile (a gradini) in singoli casi di carico in Robot Structural Analysis utilizzando il comando "Crea un caso dalla componente". Quindi, importare il collegamento o l'elemento, e questi casi di carico verranno importati separatamente e inclusi nelle combinazioni di carico definite.
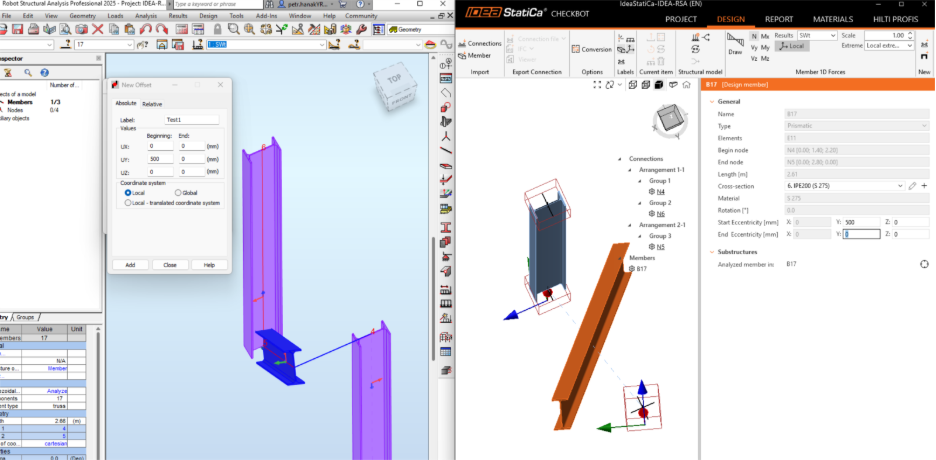
Limitazione: L'utilizzo di offset diversi all'inizio e alla fine in Robot causerà una geometria finale delle funzionalità interessate da questi offset diversa in Robot e in Checkbot. Il motivo è il diverso approccio nell'applicazione di queste eccentricità in ciascuno di questi software.
Soluzione alternativa: Regolare la geometria utilizzando le voci Eccentricità iniziale e Eccentricità finale in Checkbot per ottenere la geometria desiderata.
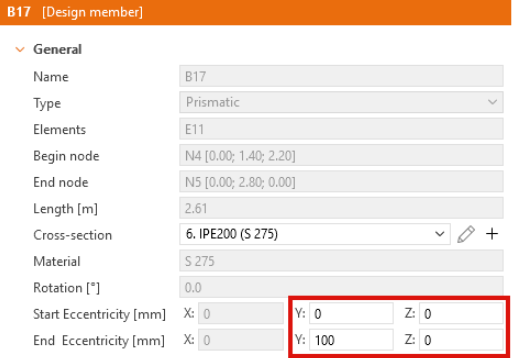
Limitazione: Eccentricità definita solo a un'estremità in Robot – questo tipo di importazione non è supportato in Checkbot e la geometria risultante è errata. Il problema si verifica perché, in Robot, il sistema di coordinate locale (LCS) dell'elemento include già l'eccentricità definita. Durante l'importazione in Checkbot, l'elemento viene generato in base al punto iniziale e alla direzione ricavati dall'LCS di Robot. Ciò causa un posizionamento errato dell'elemento fin dall'inizio. Inoltre, l'eccentricità definita in Robot viene applicata nuovamente in Checkbot, il che aumenta la discrepanza e produce una differenza ancora maggiore tra la geometria prevista e quella importata.
Soluzione alternativa: Non utilizzare l'eccentricità unilaterale in Robot; regolarla invece manualmente in Checkbot dopo l'importazione. Tuttavia, ciò significa che l'opzione di sincronizzazione non può essere utilizzata.