Derzeit funktioniert die Verknüpfung für eine Vielzahl von Verbindungen/Knoten. Bitte beachten Sie jedoch die nicht unterstützte Funktionalität.
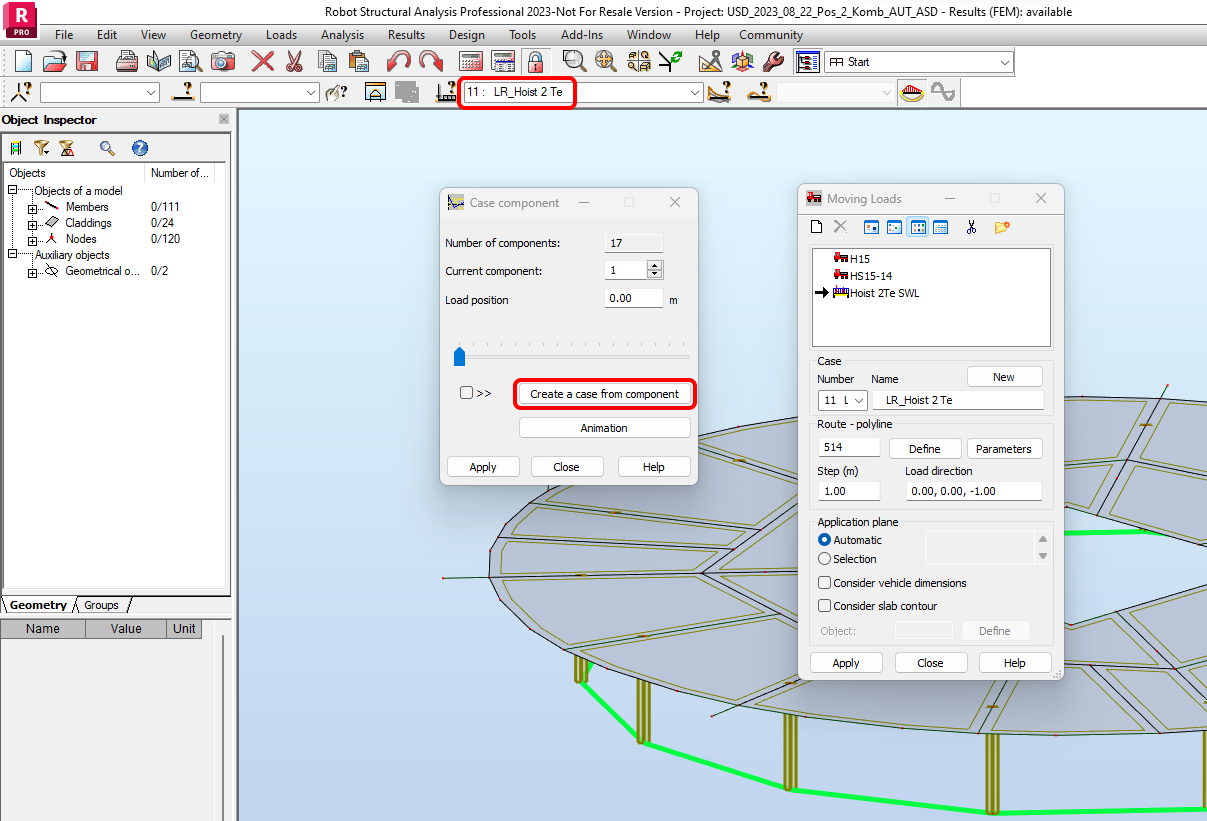
Einschränkung: Bewegliche (gestufte) Lastfälle werden nicht in Checkbot importiert. Lastkombinationen, die einen beweglichen (gestuften) Lastfall enthalten, werden importiert, jedoch werden bewegliche (gestufte) Lastfälle und ihre Schnittgrößen nicht berücksichtigt.
Lösung: Zerlegen Sie den beweglichen (gestuften) Lastfall in Robot Structural Analysis mithilfe des Befehls „Create a case from component" in einzelne Lastfälle. Importieren Sie anschließend die Verbindung oder das Bauteil – diese Lastfälle werden dann separat importiert und in den definierten Lastkombinationen berücksichtigt.
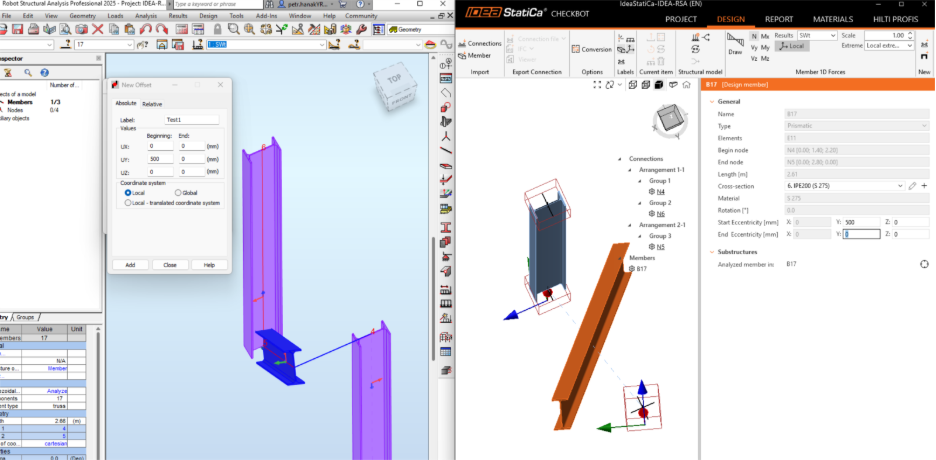
Einschränkung: Die Verwendung unterschiedlicher Versätze am Anfang und Ende in Robot führt dazu, dass die endgültige Geometrie der von diesen Versätzen betroffenen Elemente in Robot und Checkbot voneinander abweicht. Der Grund liegt in der unterschiedlichen Vorgehensweise bei der Anwendung dieser Exzentrizitäten in den jeweiligen Programmen.
Lösung: Passen Sie die Geometrie in Checkbot mithilfe der Elemente „Anfangsexzentrizität" und „Endexzentrizität" an, um die gewünschte Geometrie zu erzielen.
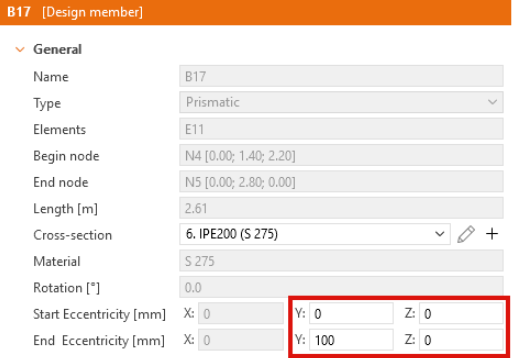
Einschränkung: Eine nur an einem Ende in Robot definierte Exzentrizität – dieser Importtyp wird in Checkbot nicht unterstützt, und die resultierende Geometrie ist fehlerhaft. Das Problem tritt auf, weil das lokale Koordinatensystem (LKS) des Bauteils in Robot die definierte Exzentrizität bereits enthält. Beim Import in Checkbot wird das Bauteil auf Basis des Startpunkts und der Richtung aus dem LKS von Robot erzeugt. Dadurch wird das Element von Anfang an falsch positioniert. Darüber hinaus wird die in Robot definierte Exzentrizität in Checkbot erneut angewendet, was die Abweichung vergrößert und zu einer noch größeren Differenz zwischen der beabsichtigten und der importierten Geometrie führt.
Lösung: Verwenden Sie in Robot keine einseitige Exzentrizität; passen Sie diese stattdessen nach dem Import manuell in Checkbot an. Dies bedeutet jedoch, dass die Synchronisierungsoption nicht verwendet werden kann.