在数值模型中,处理焊缝的方式有多种选择。大变形使力学分析更加复杂,可以采用不同的网格描述、不同的动力学和运动学变量以及本构模型。通常使用不同类型的二维和三维几何模型及相应的有限单元,以适应不同的精度要求。最常用的材料模型是基于 von Mises 屈服准则的与速率无关的塑性模型。本文介绍了用于焊缝的两种方法。设计模型中不考虑焊接引起的残余应力和变形。
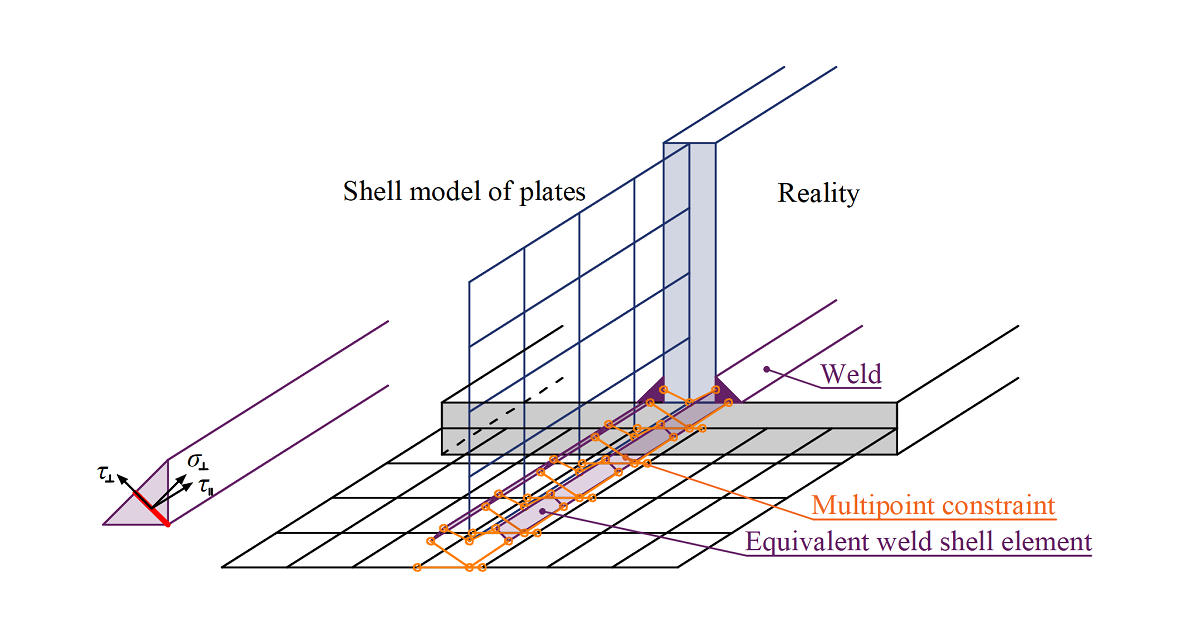
荷载通过基于拉格朗日公式的力-变形约束传递至对侧板件。该节点称为多点约束(MPC),将一块板边缘的有限单元节点与另一块板的节点相关联。有限单元节点之间并不直接连接。这种方法的优点在于能够连接不同密度的网格。该约束允许对连接板件的中面进行偏移建模,从而反映实际焊缝构造和焊喉厚度。焊缝中的荷载分布由 MPC 推导得出,因此应力在焊喉截面处计算。这对于焊缝下方板件的应力分布以及 T 形件的建模非常重要。
焊缝中的塑性应力重分布
仅采用多点约束的模型未考虑焊缝的刚度,应力分布偏于保守。出现在板边端部、角部和圆弧处的应力峰值控制着整条焊缝的承载力。为消除这一影响,在板件之间添加了一种特殊的弹塑性单元。该单元考虑了焊喉厚度、位置和方向。插入与焊缝尺寸相对应的等效焊缝实体,进行非线性材料分析,确定等效焊缝实体中的弹塑性行为。塑性状态由焊喉截面处的应力控制。应力峰值沿焊缝较长部分重新分布。
焊缝的弹塑性模型给出真实的应力值,无需对应力进行平均或插值处理。最大受力焊缝单元处的计算值直接用于焊缝组件的校核。这样,无需降低多方向焊缝、连接至未加劲翼缘的焊缝或长焊缝的承载力。
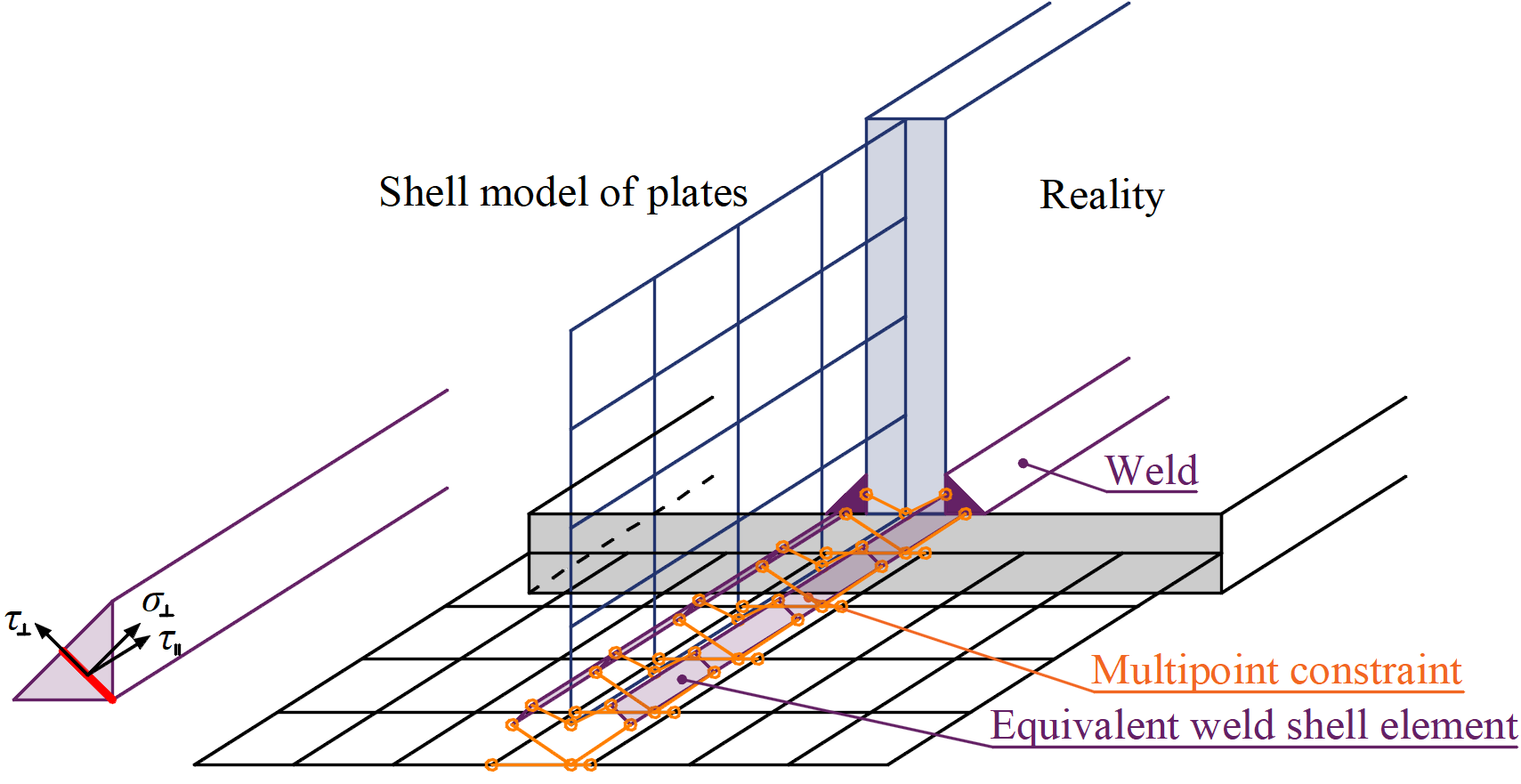
焊缝单元与网格节点之间的约束
采用塑性重分布时,一般焊缝可设置为连续焊缝、部分焊缝和断续焊缝。连续焊缝覆盖边缘的全部长度,部分焊缝允许用户设置边缘两侧的偏移量,断续焊缝还可额外设置焊段长度和间隙。