Interazione tra forza di taglio e torsione per l'armatura a taglio
Determinazione della forza nell'armatura a taglio dovuta alla forza di taglio.
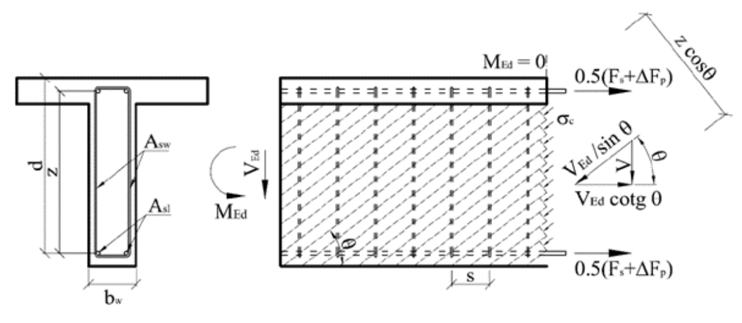
Il calcolo si basa sulla formula per il calcolo della resistenza dell'armatura a taglio definita in EN 1992-1-1. Sulla base dell'equazione 6.13 (cap. 6.2.3 (4)) la resistenza portante di una singola branca della staffa può essere derivata come:
\[{{V}_{Rd,s}}=\frac{{{A}_{sw,V}}}{s}z{{f}_{ywd}}\left( \cot \theta +\cot \alpha \right)\sin \alpha \cos \beta \]
\[\frac{{{A}_{sw,V}}}{s}={{a}_{sw,V}}\]
Asw,V . . . area della sezione trasversale di una singola branca della staffa che resiste al taglio nella sezione considerata
s . . . . . interasse dell'armatura a taglio nella direzione dell'asse longitudinale dell'elemento
asw,V . . . area della sezione trasversale dell'armatura a taglio per unità di lunghezza
z . . . . . braccio interno della coppia. Per un elemento a sezione costante, corrispondente al momento flettente nell'elemento in esame. Nell'analisi a taglio del calcestruzzo armato senza forza assiale, si può normalmente utilizzare il valore approssimato z = 0,9d.
fywd . . . il valore di progetto della tensione di snervamento dell'armatura a taglio
θ . . . . . l'angolo tra il puntone compresso in calcestruzzo e l'asse dell'elemento perpendicolare alla forza di taglio
α . . . . . l'angolo tra l'armatura a taglio e l'asse dell'elemento perpendicolare alla forza di taglio
β . . . . . inclinazione della branca della staffa rispetto alla risultante della forza di taglio applicata
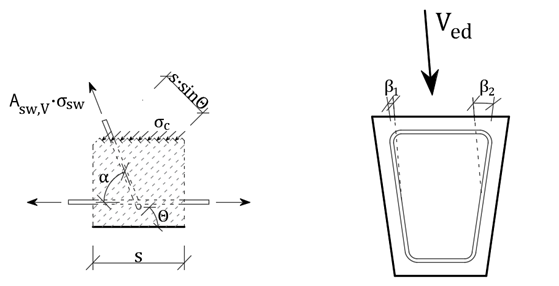
La forza di taglio è ridistribuita uniformemente tra le singole armature che resistono alla forza di taglio in base all'angolo dell'armatura e alla rigidezza assiale delle singole branche delle staffe.
\[{{V}_{ed}}={{V}_{ed,1}}+{{V}_{ed,2}}+...+{{V}_{ed,n}}\]
\[{{V}_{ed}}={{\varepsilon }_{sw,V}}\cdot z\cdot \sum\limits_{i=1}^{{{n}_{V}}}{{{a}_{sw,i,V}}\cdot {{E}_{sw,i,V}}\cdot \left( \cot \theta +\cot {{\alpha }_{i}} \right)\cdot {{\cos }^{2}}{{\beta }_{i}}}\]
Inoltre, è possibile ricavare la deformazione media dell'armatura considerata nella direzione della forza di taglio risultante:
\[{{\varepsilon }_{sw,V}}=\frac{{{V}_{ed}}}{z\cdot \sum\limits_{i=1}^{{{n}_{V}}}{{{a}_{sw,i,V}}\cdot {{E}_{sw,i,V}}\cdot \left( \cot \theta +\cot {{\alpha }_{i}} \right)\cdot {{\cos }^{2}}{{\beta }_{i}}}}\]
La deformazione effettiva della i-esima armatura può essere calcolata come:
\[{{\varepsilon }_{sw,i,V}}=\frac{{{\varepsilon }_{sw,V}}}{\sin {{\alpha }_{i}}}\cdot \cos {{\beta }_{i}}\]
La tensione in una determinata branca dell'armatura:
\[{{\sigma }_{sw,i,V}}={{\varepsilon }_{sw,i,V}}\cdot {{E}_{si,V}}\]
Determinazione della forza nella singola staffa dovuta alla torsione
La resistenza torsionale di una sezione può essere calcolata sulla base di una sezione chiusa a parete sottile, in cui l'equilibrio è soddisfatto da un flusso di taglio chiuso. Le sezioni piene possono essere modellate con sezioni equivalenti a parete sottile. Per le sezioni non piene, lo spessore equivalente della parete non deve superare lo spessore effettivo della parete.
Il flusso di taglio nelle pareti di una sezione chiusa a parete sottile dovuto alla torsione può essere calcolato come:
\[{{\tau }_{t}}\cdot {{t}_{ef}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\]
La forza di taglio in una determinata parete è quindi:
\[{{V}_{i}}={{\tau }_{t}}\cdot {{t}_{ef}}\cdot {{l}_{i}}\]
li . . . . lunghezza della linea d'asse della parete considerata
Forza di taglio nell'anima - la lunghezza della linea d'asse dell'anima può essere sostituita dal valore del braccio della coppia "z".
\[{{V}_{ed,T}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cdot z\]
Forza nelle staffe che resistono alla torsione per metro di lunghezza dell'elemento (per unità di lunghezza):
\[{{F}_{sw,T}}=\frac{{{V}_{ed,T}}}{z\cdot \cot \theta }=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cdot tg\theta\]
Scomposizione delle forze per la singola staffa
Se per tutte le staffe è definito lo stesso materiale, la tensione risultante dovuta alla torsione in ciascuna branca della staffa è costante. Quindi:
\[{{\sigma }_{sw,T}}=\frac{{{F}_{sw,T}}}{{{a}_{sw,T}}}\]
dove asw,T è l'area totale delle staffe che resistono alla torsione per unità di lunghezza.
Nel caso in cui le singole staffe abbiano materiali diversi, è necessario tenere conto della rigidezza assiale delle singole barre.
\[{{F}_{sw,T}}={{F}_{s1,T}}+{{F}_{s2,T}}+{{F}_{s3,T}}+...+{{F}_{sn,T}}=\sum\limits_{i=1}^{{{n}_{T}}}{{{F}_{si,T}}}\]
\[{{\varepsilon }_{sw,T}}=\frac{{{F}_{sw,T}}}{\sum\limits_{i=1}^{{{n}_{T}}}{\left( {{a}_{si,T}}\cdot {{E}_{si,T}} \right)}}\]
nT . . . . numero di branche dell'armatura (gruppi di armatura) che resistono alla torsione
Fsi,T . . . forza nel i-esimo gruppo di armatura risultante dalla torsione per unità di lunghezza
asi,T . . . area della sezione trasversale dell'armatura a taglio che resiste alla torsione per unità di lunghezza
Esi,T . . . modulo di elasticità di Young del i-esimo gruppo di armatura che resiste alla torsione
εsw,T . . deformazione nell'armatura dovuta alla torsione
La tensione risultante in ciascuna staffa dovuta alla torsione applicata è calcolata come:
\[{{\sigma }_{sw,i,T}}={{\varepsilon }_{sw,T}}\cdot {{E}_{si,T}}\]
Interazione V+T
Il calcolo delle tensioni nelle staffe dovute al taglio e alla torsione è quindi una somma delle tensioni dovute ai singoli componenti di carico.
\[{{\sigma }_{sw,i}}={{\sigma }_{sw,i,V}}+{{\sigma }_{sw,i,T}}\]
Forza risultante nella i-esima armatura:
\[{{F}_{sw,i}}={{a}_{sw,i}}\cdot {{\sigma }_{sw,i}}\]
Interazione tra taglio, torsione e flessione per l'armatura longitudinale
Determinazione della forza in ciascuna armatura longitudinale dovuta alla forza normale e al momento flettente
L'applicazione RCS viene utilizzata per calcolare la risposta della sezione trasversale alla combinazione della forza normale e del momento flettente, al fine di determinare la tensione e la deformazione nelle singole barre longitudinali e nell'armatura da precompressione.
Determinazione della forza nella singola armatura longitudinale dovuta alla forza di taglio
L'incremento della forza di trazione nell'armatura longitudinale ΔFtd dovuto alla forza di taglio dipende dalla geometria del modello puntone-tirante.
\[\Delta {{F}_{td}}={{V}_{ed}}\left( \cot \theta -\cot \alpha \right)\]
ΔFtd . . . incremento della forza di trazione nell'armatura longitudinale dovuto alla forza di taglio
Ved . . . . valore di progetto della forza di taglio agente nella sezione considerata
θ . . . . . l'angolo tra il puntone compresso in calcestruzzo e l'asse dell'elemento
α . . . . . l'angolo tra l'armatura a taglio e l'asse dell'elemento
Per l'armatura longitudinale situata nel corrente teso, la forza risultante Ft nell'armatura longitudinale dovuta alla combinazione N+M+V non deve essere superiore a MEd,max/z (dove MEd,max è il momento massimo lungo la trave)
\[{{F}_{t}}=\frac{{{M}_{Ed}}}{z}+0,5{{V}_{ed}}\left( \cot \theta -\cot \alpha \right)\le \frac{{{M}_{Ed,\max }}}{z}\]
La forza ΔFtd è trasmessa da tutti i tendini aderenti e dall'armatura situata nella parte della sezione trasversale che resiste al taglio (l'anima nel caso di un profilo a I). Per sicurezza, il contributo dell'armatura da precompressione può essere considerato pari a 0. L'ipotesi di calcolo è che l'incremento della deformazione assiale delle singole armature longitudinali che resistono al taglio sia costante (Δεs1,V = Δεs2,V = .... =Δεp1,V = Δεp2,V = ... = ΔεV = cost.). La derivazione è valida per un diagramma di lavoro bilineare dell'armatura con ramo plastico orizzontale. Nel caso di un diagramma con ramo inclinato, il calcolo deve essere modificato.
\[\Delta {{F}_{td}}=\Delta {{F}_{s}}+\Delta {{F}_{s}}\]
\[\Delta {{F}_{td}}=\Delta {{\varepsilon }_{V}}\cdot \sum\limits_{i=1}^{{{n}_{s,V}}}{{{A}_{sl,i,V}}\cdot {{E}_{sl,i,V}}}+\Delta {{\varepsilon }_{V}}\cdot \sum\limits_{i=1}^{{{n}_{p,V}}}{{{A}_{pl,i,V}}\cdot {{E}_{pl,i,V}}}\]
ΔεV . . . . incremento di deformazione nell'armatura longitudinale dovuto alla forza di taglio
ns,V . . . . numero di armature longitudinali che resistono alla forza di taglio
Asl,i,V . . . area della i-esima armatura longitudinale che resiste alla forza di taglio
Esl,i,V . . . modulo di elasticità di Young della i-esima armatura longitudinale che resiste alla forza di taglio
np,V . . . . numero di tendini che resistono alla forza di taglio
Apl,i,V . . . area del i-esimo tendine che resiste alla forza di taglio
Epl,i,V . . . modulo di elasticità di Young del i-esimo tendine che resiste alla forza di taglio
Dopo aver determinato il valore della forza ΔFtd, è possibile calcolare la deformazione media dell'armatura ΔεV.
\[\Delta {{\varepsilon }_{V}}=\frac{\Delta {{F}_{td}}}{\sum\limits_{i=1}^{{{n}_{s,V}}}{{{A}_{sl,i,V}}\cdot {{E}_{sl,i,V}}}+\sum\limits_{i=1}^{{{n}_{p,V}}}{{{A}_{pl,i,V}}\cdot {{E}_{pl,i,V}}}}\]
Incremento di tensione nelle singole barre longitudinali dovuto alla forza di taglio applicata:
per barra d'armatura \[\Delta {{\sigma }_{sl,i,V}}=\Delta {{\varepsilon }_{V}}\cdot {{E}_{sl,i,V}}\]
per tendine \[\Delta {{\sigma }_{pl,i,V}}=\Delta {{\varepsilon }_{V}}\cdot {{E}_{pl,i,V}}\]
Determinazione della forza in ciascuna armatura longitudinale dovuta alla torsione
È molto importante determinare l'armatura longitudinale che resiste alla torsione. Si tratta dell'armatura situata in una sezione trasversale equivalente a parete sottile cava che resiste alla torsione.

\[\frac{\sum{{{A}_{sl}}{{f}_{yd}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta \]
Secondo EN 1992-1-1, devono essere soddisfatte diverse condizioni per l'armatura longitudinale resistente alla torsione:
- l'armatura deve essere distribuita uniformemente lungo la lunghezza zi, ma nelle sezioni di piccole dimensioni l'armatura può essere concentrata agli angoli della staffa
- la distanza assiale massima dell'armatura longitudinale è 350 mm
Il contributo dell'armatura da precompressione non è considerato secondo EN 1992-1-1.
La norma EN 1992-2 stabilisce che il contributo dell'armatura da precompressione può essere considerato, ma l'incremento massimo di tensione nell'armatura da precompressione non deve superare Δσp ≤ 500MPa. La formula può quindi essere modificata:
\[\frac{\sum{{{A}_{sl}}{{f}_{yd}}+\sum{{{A}_{p}}\Delta {{\sigma }_{p}}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
Tuttavia, poiché l'incremento dell'armatura da precompressione può essere considerato, la scelta spetta all'utente. Attualmente, l'armatura da precompressione non è considerata nel calcolo.
L'ipotesi di calcolo è che l'incremento della deformazione assiale di ciascuna armatura longitudinale che resiste al taglio sia costante (Δεs1,T = Δεs2,T = .... =Δεp1,T = Δεp2,T = ... = ΔεT = cost.). La derivazione è valida per un diagramma di lavoro bilineare dell'armatura con ramo plastico orizzontale. Nel caso di un diagramma con ramo crescente, il calcolo deve essere modificato.
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\sigma }_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\varepsilon }_{T}}\cdot {{E}_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\Delta {{\varepsilon }_{T}}=\frac{{{T}_{ed}}\cdot {{u}_{k}}}{2{{A}_{k}}\cdot \sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot {{E}_{s,i,T}}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\sigma }_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\frac{\sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot \Delta {{\varepsilon }_{T}}\cdot {{E}_{s,i,T}}}}{{{u}_{k}}}=\frac{{{T}_{ed}}}{2{{A}_{k}}}\cot \theta\]
\[\Delta {{\varepsilon }_{T}}=\frac{{{T}_{ed}}\cdot {{u}_{k}}}{2{{A}_{k}}\cdot \sum\limits_{i=1}^{{{n}_{T}}}{{{A}_{sl,i,T}}\cdot {{E}_{s,i,T}}}}\cot \theta\]
Ted . . . . il valore di progetto del momento torcente applicato nella sezione considerata
θ . . . . . inclinazione delle diagonali compresse rispetto all'asse longitudinale della trave (identica a quella per la forza di taglio)
uk . . . . perimetro dell'area Ak
Af . . . . l'area definita dalla linea d'asse della sezione cava equivalente a parete sottile
ns,T . . . .numero di armature longitudinali in calcestruzzo armato che resistono al momento torcente
Asl,i,T . . . area della i-esima armatura longitudinale in calcestruzzo armato che resiste al momento torcente
ΔεT . . . .la variazione della deformazione dell'armatura longitudinale dovuta al momento torcente
Δσs,i,T . . variazione di tensione nella i-esima armatura longitudinale dovuta al momento torcente
Esl,i,T . . . modulo di elasticità della i-esima armatura longitudinale in calcestruzzo armato che resiste al momento torcente
Incremento di tensione in ciascuna armatura longitudinale dovuto al momento torcente applicato:
\[\Delta {{\sigma }_{sl,i,T}}=\Delta {{\varepsilon }_{T}}\cdot {{E}_{sl,i,T}}\]